Background
I built an embedded gesture-recognition “wand” that classifies 6 IMU gestures on an STM32F411RE in real time, then used it as a testbed to compare opaque AutoML (in this case NanoEdgeAI) against a fully transparent Scikit-learn → emlearn → C pipeline. AutoML tools can be fast, but when model internals aren’t visible, debugging and long-term maintenance can be painful. The core question here was: can an ML newbie use an open pipeline to create models that match (or beat) NanoEdgeAI on real hardware accuracy, latency, and memory while staying reproducible and inspectable?
Hardware + Dataset
- MCU: NUCLEO-F411RE (Cortex-M4F, 512 KB flash / 128 KB SRAM)
- IMU: MPU9250 (accel + gyro used; mag ignored) over I2C
- Sampling: 200 Hz, accel ±16 g, gyro ±2000 dps, 16-bit
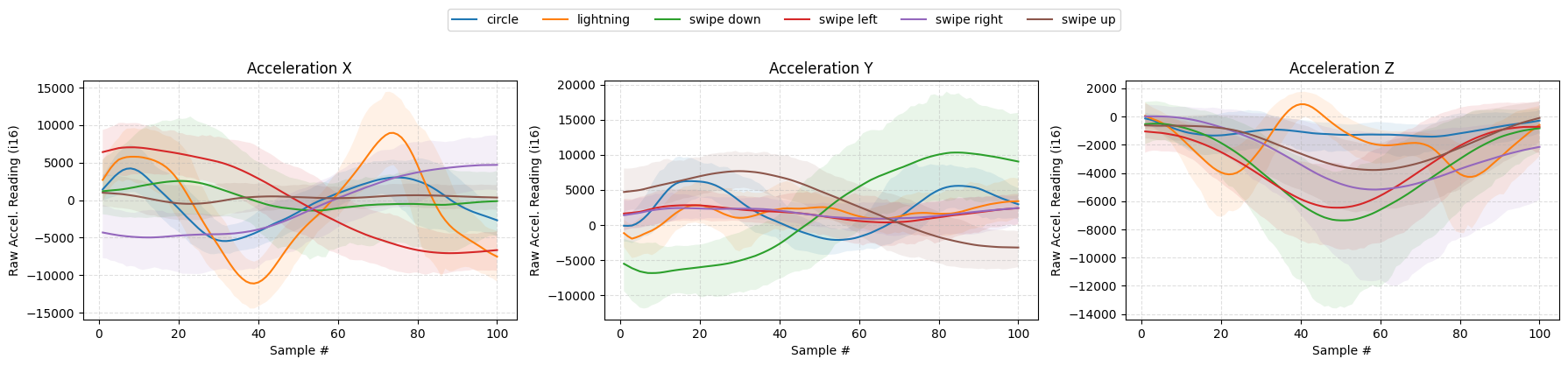
- Gestures: circle, lightning, swipe up/down/left/right
- After cleaning + standardizing duration, the final dataset used for training was 1200 labeled samples (200 per gesture). Each sample was resampled to 100 time steps and flattened into a 600-element feature vector (6 channels × 100).

Two model pipelines
1) NanoEdgeAI (opaque / generated)
- Generated and ranked many candidates; I exported the top SVM, RF, and MLP by NanoEdgeAI’s “quality index” and deployed the generated C to the MCU.
2) Transparent pipeline (reproducible)
- Trained Scikit-learn MLP + RF variants, selected configs using a weighted score prioritizing balanced accuracy (with small penalties for estimated compute + memory), then converted to C using emlearn for on-device inference.
Final evaluation was on-device using a new participant (not in the training set), 50 trials per gesture, recording predicted class + inference time.
Key results (on-device)
| Model | On-device accuracy | On-device inference time | Compiled flash |
|---|---|---|---|
| Custom MLP (Scikit→emlearn) | 91.78% | 3178 µs | 115.836 KB |
| NanoEdgeAI MLP | 91.00% | 824 µs | 35.880 KB |
| NanoEdgeAI SVM | 81.67% | 454 µs | 29.004 KB |
| Custom RF (Scikit→emlearn) | 76.32% | 15.27 µs | 30.292 KB |
| NanoEdgeAI RF | 51.00% | 412 µs | 37.484 KB |
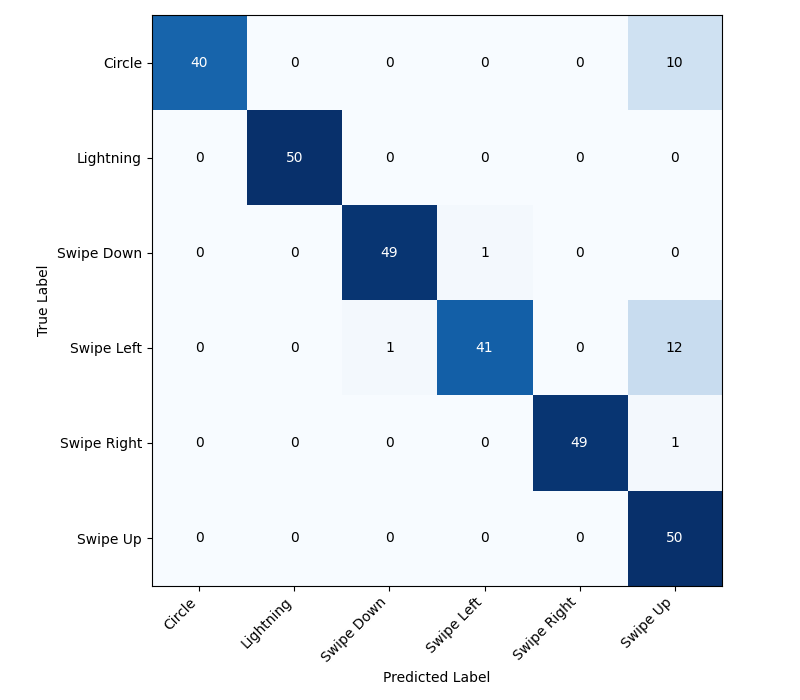
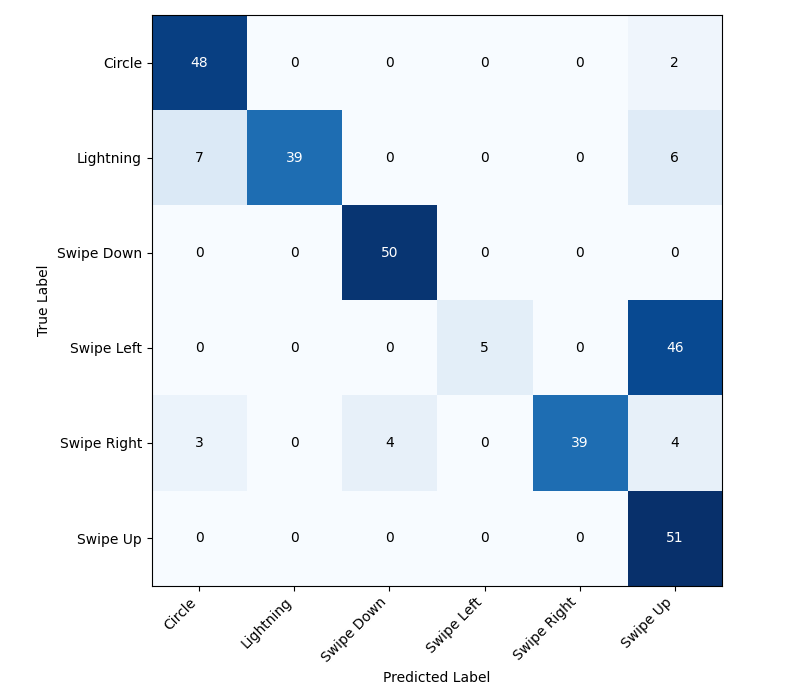
Two practical observations mattered more than the headline numbers:
- “Blind spots” happened. NanoEdgeAI’s SVM and RF failed completely on the circle gesture during live testing (0% correct), and NanoEdgeAI RF also showed a blind spot for lightning.
- Estimated performance ≠ deployed performance. Across models, real on-device behavior diverged from tool-reported estimates—especially for NanoEdgeAI.
What I’d do differently next
- Quantize / fixed-point custom models to shrink flash (the custom MLP used float weights, inflating size).
- A lot more time could be put into the implementation of the custom models. Due to the short-timeline it was deemed out of scope.
- Collect a bigger, more variable dataset (inter-user motion inconsistency was a real limiter).
- Explore Burn 🦀
Full write-up
If you want the full methodology, plots, and confusion matrices, the complete paper is here: Cracking the Code: Achieving High-Performance Embedded Gesture Recognition with Transparent Pipelines