Submission Video
Background
Developed at MakeUofT 2022 by myself and 3 other group members, the “Anti-Anti Masker Mask” was a light-hearted yet technically complex hackathon project inspired by pandemic-era distancing rules. The system combined computer vision, embedded control, and custom mechanical design to autonomously respond when an unmasked person approached within two meters.
System Overview
The prototype consisted of three main subsystems: mechanical, sensing and vision, and embedded control.
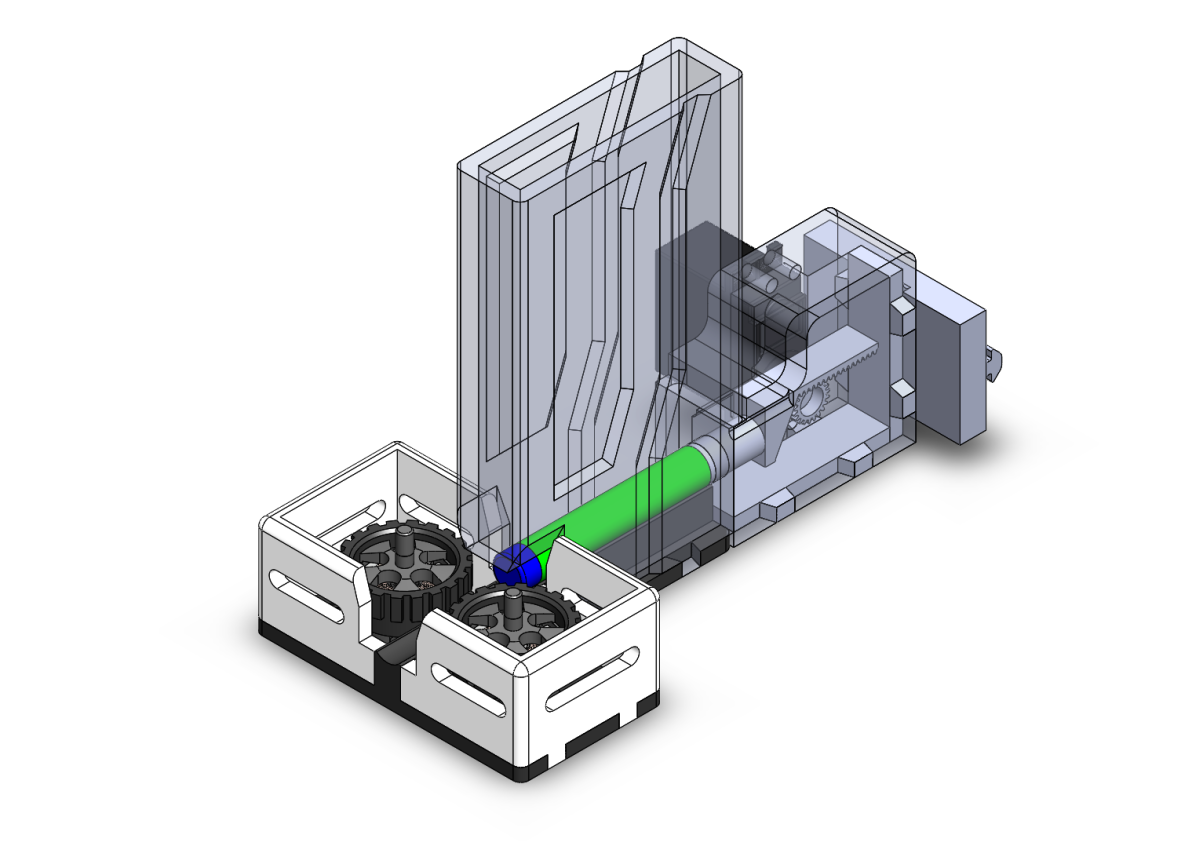
1. Mechanical Design
The dart launcher, loading system, and shoulder frame were custom-modeled in SolidWorks and fabricated with FDM 3D printing. Because we had no fasteners on hand, we used dovetail joints inspired by woodworking to make the assembly fully snap-fit.
The launcher used two brushless drone motors as flywheels, powered by a small Li-Po battery. Darts were fed into the chamber via a rack-and-pinion system driven by a servo motor. Everything was orchestrated by an Arduino Nano, which received firing commands from a laptop.
2. Sensing and Vision
A Time-of-Flight (TOF) distance sensor continuously measured the distance to the nearest person. A laptop ran an OpenCV-based vision pipeline that accessed a live camera feed, performed face detection, and identified whether the detected face was masked.
If an unmasked person entered a configurable “danger zone” (roughly 0.8 m – 1.5 m), a command was sent via UART to the Arduino to activate the launcher.
Code
The Arduino handled motor timing, servo control, and safety interlocks. All communication between the laptop and launcher was done over serial, using a simple message protocol for distance and trigger events. We prioritized responsiveness — latency from detection to launch averaged under 200 ms in our demo tests.
Challenges and Adaptation
Our initial plan was to run the entire system TOF sensing, computer vision, and motor control on a Raspberry Pi for a fully self-contained, battery-powered build. Reality struck when we discovered the Pi Zero couldn’t run OpenCV in real-time. It started as a miscommunication as we borrowed what we thought was going to be a Raspberry Pi 3 from a friend, but it ended up being a Pi Zero.
With only a few hours left, we refactored the architecture into a split system: the laptop handled sensing and vision, while the Arduino managed actuation. This quick pivot allowed us to finish with a fully functional (and crowd-pleasing) prototype by demo time.
More
For more info on the challenges we faced, lessons we learned, and future improvements please check out the AAMM DevPost link below : https://devpost.com/software/anti-anti-masker-mask